4-DOF Wireless Underwater Combustion Driven Soft Robot

Problem:
The Robotics and Intelligent Systems (RiSYS) Lab tasked us with designing an underwater robot capable of controlling its orientation, depth, and forward motion without using any hard actuators or rotating machinery. The only permitted sources of actuation were fuel cells. We were to model the robot off the mudskipper, naming the project MUDKIP as a play on the animal and our team mascot. The goal was a working proof of concept.
.jpg)
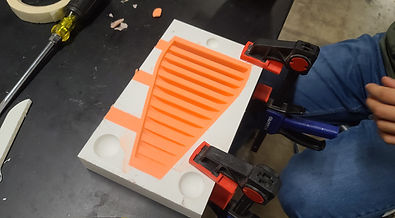
Initial Idea:
Our first approach was a soft-bodied robotic fish tail. The design used inflatable bladders with a bilaterally symmetric split-bladder tail adapted from an MIT research paper on soft-robotic undulating fish locomotion. Fuel cells would generate gas to alternately inflate and deflate the tail bladders, producing the oscillation needed for propulsion. We fabricated and tested the tail, and although it worked, the pressure required to swim like a fish was far beyond what our electrolyzers could realistically deliver. We abandoned the soft-body approach and shifted to a fundamentally different architecture, and we learned to validate our dynamics before building.

_edited.jpg)
Prototyping and Testing:
Each of the robot's three core subsystems, the BCD, the pill, and the combustion chamber, was prototyped and validated independently before integration. The BCDs were iterated for compactness and waterproofing, then bench-tested in a bucket to verify watertightness and neutral buoyancy. The pill went through the same process at a larger scale, tested in a fish tank after multiple rounds of exterior coatings and interior reinforcement at every potential leak point, with the lid undergoing two full design revisions before we settled on a modified threaded container top.
Combustion chamber testing was the most involved, since the entire propulsion concept hinged on it. We built a dedicated linear test rig with parallel rails and slider blocks to measure thrust from a single combustion event, following a strict safety procedure with a 50-foot standoff and Tracker video analysis for quantitative results. Across iterations of materials and geometries, we converged on a stainless-steel piston-cylinder design that produced 21.45 N of thrust. In parallel, every revision was submerged during active electrolysis to check for bubbling, with leaks patched using underwater JB Weld until the chamber held a fully sealed condition.


.jpg)
.jpg)



CFD Analysis:
To validate the hydrodynamic performance of the pill geometry, we ran a CFD simulation in SimScale with the robot held stationary in a 1 m/s freestream of incompressible water. The flow field showed clean stagnation at the leading edge and the acceleration around the top and bottom contours, with vortex formation and flow separation behind the rear, a clear signal that the trailing edge could benefit from tapering in a future revision. The simulation produced 3 N of drag in the x-direction, yielding an overall drag coefficient of 0.244, better than that of a Tesla car, which confirmed the body shape was viable for underwater propulsion.
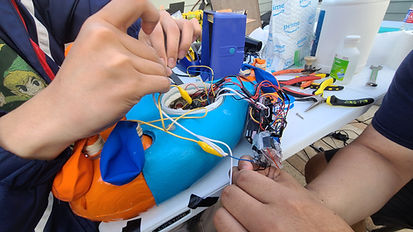
Final Design:
The final MUDKIP robot was a 5 kg, 4-DOF, tetherless underwater vehicle controlled wirelessly over 2.4 GHz Wi-Fi from a laptop ground station. Three identical, interchangeable BCDs, one mounted at the front and two at the rear, provided roll and pitch control by selectively inflating their hydrogen and oxygen balloons via onboard electrolyzers. Forward propulsion was generated by a custom single-shot piston-cylinder combustion chamber that ignited the same H₂/O₂ gas using a high-voltage transformer circuit and spark plug. The pill housed the Arduino, MOSFET switching circuit, ignition transformer, and power banks for the electrolyzers, and was sealed with a modified Lock & Lock Tupperware lid for a reliable threaded O-ring closure. To achieve neutral buoyancy, approximately 340 g of stainless steel ballast was added inside the BCDs, bringing the robot's overall density to 1000 kg/m³. The exterior was finished in orange and blue, a nod to the team's MUDKIP mascot and a practical choice for visibility underwater.



Results:
The fully integrated robot was tested submerged for over three hours with zero water ingress, validating the waterproofing across all subsystems. The robot demonstrated 4 degrees of freedom: roll and pitch via differential BCD inflation, vertical motion through coordinated buoyancy control, and forward motion through hydrogen-oxygen combustion. Tracker video analysis measured a peak acceleration of 3 m/s², corresponding to a forward thrust of approximately 15 N on the 5 kg robot, consistent with the 21.45 N measured in dry bench tests once hydrodynamic drag was accounted for. Overall, MUDKIP demonstrated that a wirelessly controlled, fully submerged robot could achieve multi-axis orientation and forward propulsion using only electrolyzer-driven gas actuation, with no hard actuators, no rotating machinery, and no tethers.